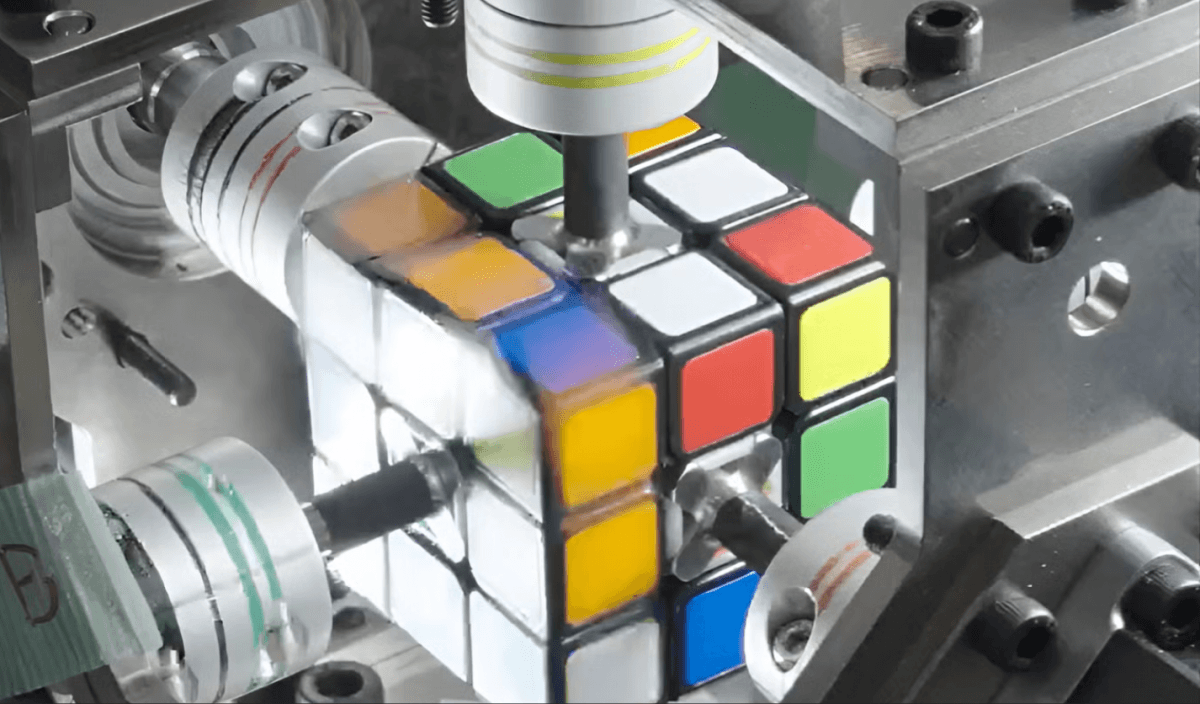
Robot spoločnosti Mitsubishi Electric vytvoril nový svetový rekord v zostavení klasickej Rubikovej kocky 3x3x3 za neuveriteľných 0,305 sekundy. Kľúčom k úspechu boli špeciálne vyvinuté vysokorýchlostné servomotory, ktoré dokážu otočiť stranu kocky za menej ako jednu stotinu sekundy.
Predstavte si, že žmurkniete. Presne taký čas – menej ako tri desatiny sekundy – potreboval špecializovaný robot na to, aby z chaoticky pomiešanej Rubikovej kocky vytvoril dokonale zoradenú kocku so všetkými šiestimi stranami rovnakej farby. Tento úspech nie je len o suchých číslach; je to fascinujúce prelínanie inžinierskeho umu, fyzikálnych limitov a lásky k legendárnemu hlavolamu.
Čo je na tom tak zložité? Na prvý pohľad by sa mohlo zdať, že výkonný robot by mal túto úlohu zvládnuť ľahko. Realita je však iná. Hlavným nepriateľom sa stáva samotná fyzikálna podstata kocky. Pri extrémnych rýchlostiach a silách hrozí, že sa kocka zasekne alebo dokonca rozpadne. Dosiahnuť rekord znamenalo nielen naprogramovať optimálny algoritmus riešenia, ale aj jemne vyladiť pohyb tak, aby bol rýchly, ale zároveň dostatone presný a šetrný.
Ak by ste sa pokúsili riešiť kocku podobnou rýchlosťou, čo by bolo kľúčové? Tu je pár nápovied:
– Zamyslite sa nad tým, čo limituje človeka – naša motorika a rýchlosť vnímania.
– Robot nepremýšľa. Vopred pozná presný sled ťahov. Skúste premyslieť, ako znížiť počet nutných otočení.
– Niekedy je rýchlejšie urobiť ťah, ktorý situáciu krátkodobo „zhorší“, ale v konečnom dôsledku vedie k rýchlejšiemu výsledku.

Riešenie a princíp: Robot nepoužíva žiadnu magiu. Využíva vyspelé počítačové videnie na okamžité analyzovanie rozloženia farieb. Na základe tejto analýzy vypočíta najkratšiu možnú sekvenciu ťahov pomocou osvedčených algoritmov (ako je napríklad CFOP, ktorý používajú aj ľudskí šampióni). Skutočný trik však spočíva v hardvéri: špeciálne vyvinuté servomotory s mimoriadne nízkym časom odozvy. Tieto motory dokážu vykonať otočenie o 90 stupňov za neuveriteľných 0,009 sekundy. Celý proces – od snímania, cez výpočet po fyzické poskladanie – sa tak zmestí do časového úseku kratšieho ako ľudské žmurknutie.
| Aspekt | Človek (Max Park, rekord 3.13s) | Robot (Mitsubishi, rekord 0.305s) |
|---|---|---|
| Rýchlosť pohybu | Obmedzená svalovou biológiou a reflexmi | Motory s odozvou pod 0,01s |
| Rozhodovanie | Intuícia, rozpoznávanie vzorov, predtrénované algoritmy | Okamžitý výpočet optimálnej cesty |
| Hlavná výzva | Koordinácia rúk a mentálna vytrvalosť | Fyzikálna odolnosť kocky pri extrémnych silách |
| „Chyba“ | Psychologický tlak, omyl v algoritme | Technická závada, zaseknutie kocky |
Skúste si teraz rýchlu mentálnu rozcvičku: Máte kocku, kde sú všetky rohy a hrany na svojom mieste, ale nie sú správne natočené. Čo bude rýchlejšie – otáčať každý kúsok zvlášť, alebo použiť krátku sekvenciu, ktorá ich otočí viacero naraz? Táto myšlienka paralelizácie úkonov je základom pokročilých metód riešenia.
Tri inžinierske insighty do riešenia extrémnych hlavolomov:
1. Niekedy musíte optimalizovať nie počet krokov, ale čas, ktorý každý krok zaberie.
2. Najslabším článkom reťaze je často materiál, nie myšlienka.
3. Skutočná elegancia riešenia často spočíva v eliminácii zbytočného pohybu.
Evolúcia týchto rekordov je sama o sebe pútavým hlavolomom. Ako sa posúvajú hranice? Porovnajme si vývoj v čase:
| Rok | Držiteľ rekordu | Čas | Kľúčová technológia / Metóda |
|---|---|---|---|
| 2009 | Robot (CubeStormer) | ~64 sekúnd | Lego Mindstorms, základné snímanie |
| 2016 | Robot (Sub1 Reloaded) | 0,637 sekundy | Rýchle pneumatické pištole |
| 2024 | Robot (Mitsubishi Electric) | 0,305 sekundy | Vlastné vysokorýchlostné servomotory, optimalizovaný algoritmus |
Tento pokrok ukazuje, že limity sa neustále prekonávajú. Zatiaľ čo ľudský rekord sa zdokonaľuje o desatiny sekúnd vďaka lepšej finger trick technike a hlbšiemu poznaniu algoritmov, robotický svet zažíva revolúciu v hardvéri. Otázkou zostáva, kde je absolútna fyzikálna hranica – ako rýchlo sa môže plastová kocka otáčať, aby sa nerozpadla? To je hlavolom pre budúcich inžinierov.



Často kladené otázky
Použil robot na riešenie umelú inteligenciu?
Nie v zmysle strojového učenia. Použil rýchly počítačový algoritmus (podobný tým ľudským) na výpočet najkratšej sekvencie ťahov.Prečo je pre robot také ťažké prekonať tento čas?
Hlavným limitom je teraz fyzika: pri extrémnych rýchlostiach hrozí zaseknutie alebo poškodenie mechanizmu kocky.Môže človek niekedy dosiahnuť takýto čas?
Je to takmer vylúčené kvôli biologickým obmedzeniam našich svalov, nervov a rýchlosti vnímania.Aký algoritmus robot použil?
S najväčšou pravdepodobnosťou nejakú formu optimalizovaného algoritmu ako CFOP alebo dokonca algoritmus pre najmenší počet ťahov (God’s Algorithm).Na čo vývoj takýchto motorov spoločnosti Mitsubishi reálne slúži?
Vysoko výkonné a presné motory nájdu uplatnenie v priemyselnej automatizácii, robotike, obrábacích strojoch a spotrebnej elektronike.Bola použitá špeciálna kocka?
Pravdepodobne bola kocka optimalizovaná pre plynulý a rýchly pohyb, ale stále ide o štandardný mechanizmus 3x3x3.Koľko ťahov robot potreboval na vyriešenie?
Guinnessova kniha rekordov neuvádza presný počet, ale optimálne riešenie z náhodného stavu zvyčajne vyžaduje okolo 20 ťahov.Je možné, že tento rekord ešte niekto prekoná?
Áno, je to pravdepodobné. Ďalší pokrok bude závisieť od nových materiálov kocky a ešte rýchlejšej mechatroniky.